Featured Publications




Navigation of a Self-Driving Vehicle Using One Fiducial Marker
Yibo Liu; Hunter Schofield; Jinjun Shan
in Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Karlsruhe, Germany, 2021, pp. 1-6.
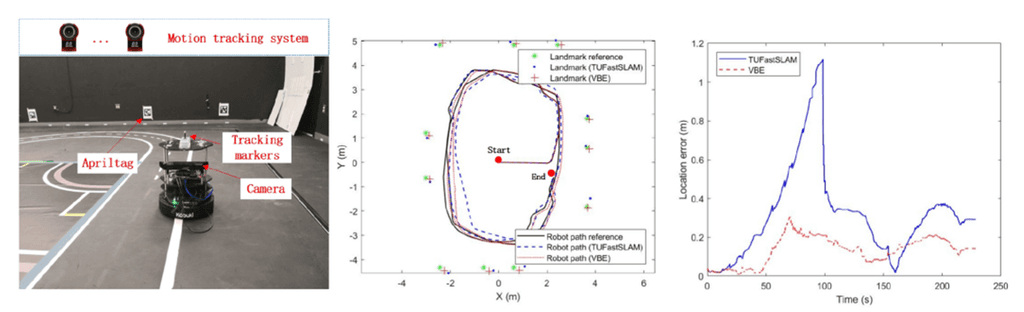
Variational Bayesian Estimator for Mobile Robot Localization With Unknown Noise Covariance
Shuo Zhang; Jinjun Shan; Yibo Liu
in IEEE/ASME Transactions on Mechatronics (T-Mech), vol. 27, no. 4, pp. 2185-2193, Aug. 2022
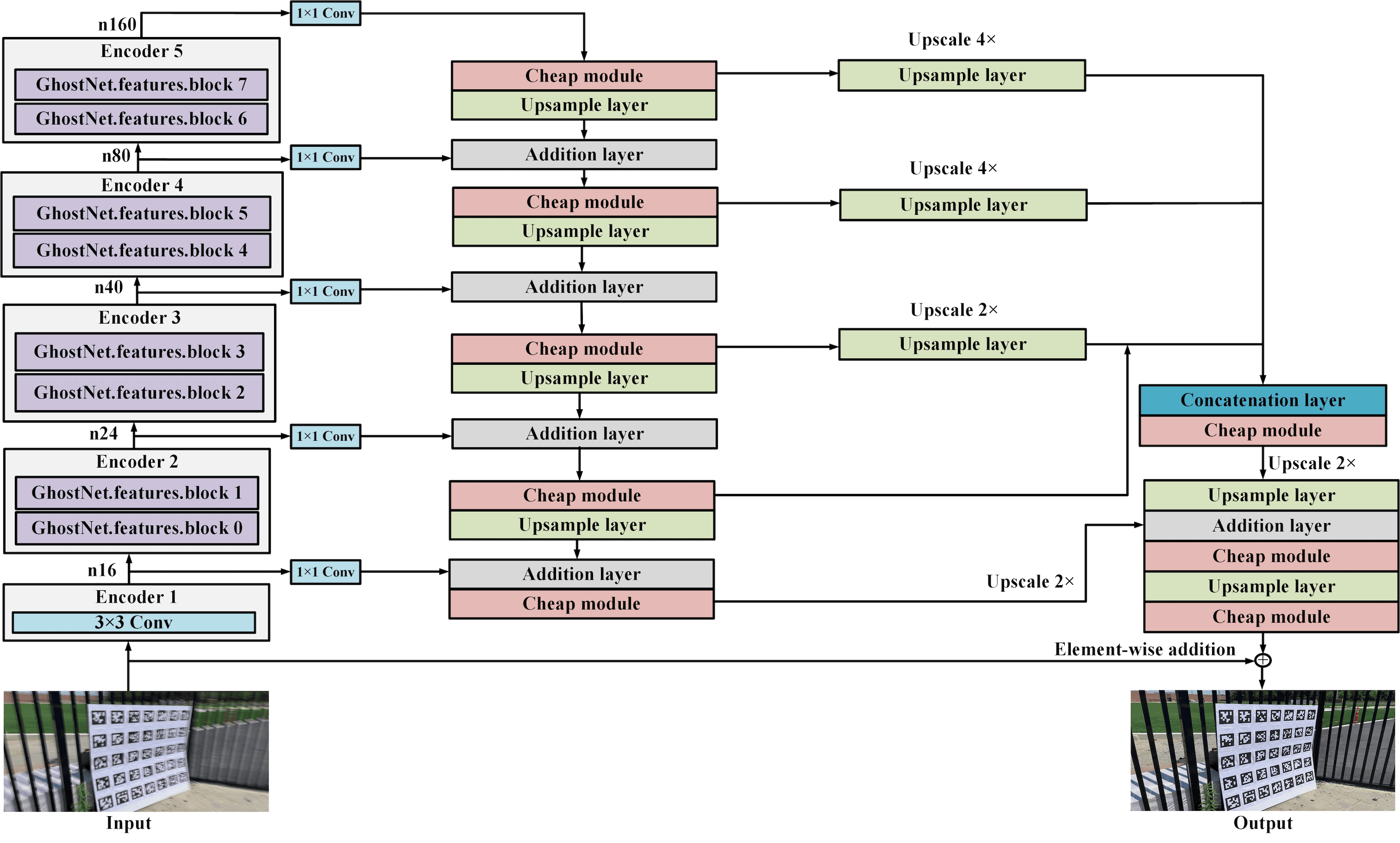
Application of Ghost-DeblurGAN to Fiducial Marker Detection
Yibo Liu, Amaldev Haridevan, Hunter Schofield, Jinjun Shan
in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 6827-6832
Intensity Image-based LiDAR Fiducial Marker System
Yibo Liu, Hunter Schofield, Jinjun Shan
in IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 3, pp. 6542-6549, July 2022

Zheyuan Yang, Yibo Liu, Guile Wu, Tongtong Cao, Yuan Ren, Yang Liu, Bingbing Liu
arXiv preprint arXiv:2309.16110, 2023
I am Yibo Liu, currently a fourth-year Ph.D. student at York University, supervised by Professor Jinjun Shan. I obtained my bachelor's degree and master's degree in 2017 and 2020. respectively, both at Beihang University (Beijing University of Aeronautics and Astronautics).
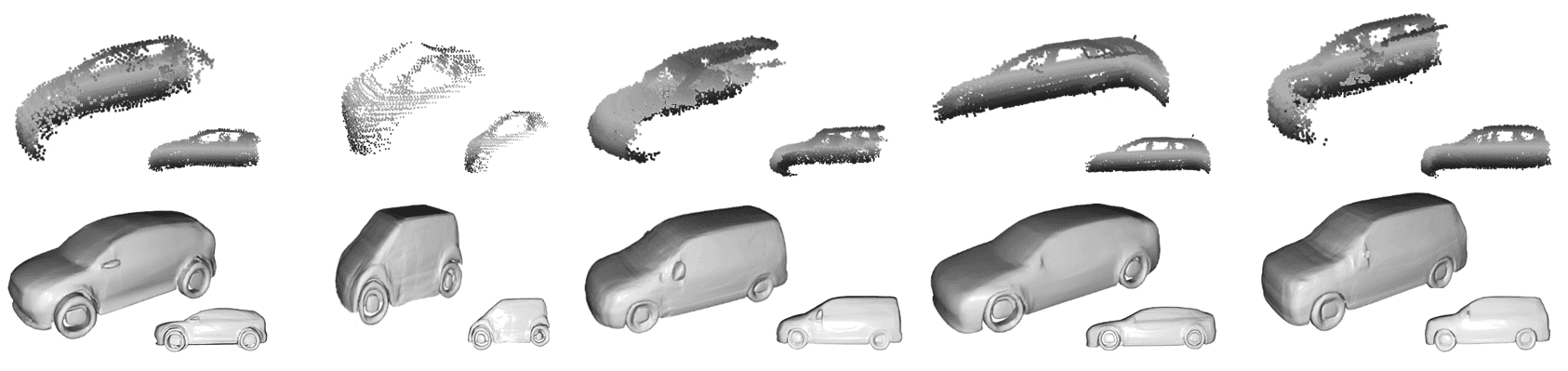
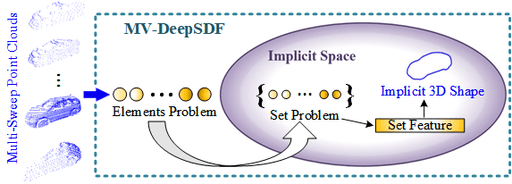
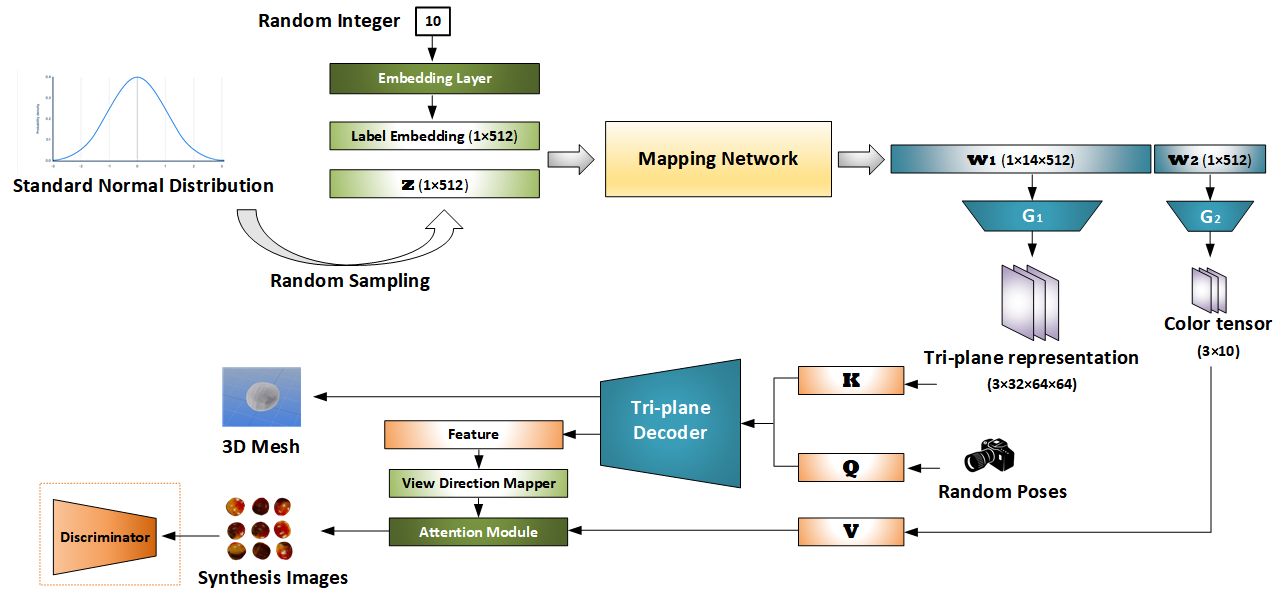
My Ph.D. career started with research in robotic vision. Since June 2022, I have been working as an associate researcher (part-time internship) at Huawei Technologies in Toronto, where I conduct product-oriented academic research. My research primarily involves implicit modeling and 3D content (NeRFs) generation, which provides objects for the simulation in autonomous driving. MV-DeepSDF (ICCV2023) and Learning Effective NeRFs and SDFs Representations with 3D Generative Adversarial Networks for 3D Object Generation (Top-3 winner of OmniObject3D challenge at ICCV2023) summarize my work.
Currently, I'm working on text-to-NeRF generation.
Yibo Liu, Kelly Zhu, Guile Wu, Yuan Ren, Bingbing Liu, Yang Liu, Jinjun Shan;
in Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023, pp. 8306-8316